As noted in the prior post Setup 11 the entire site will be periodically recorded/imaged – aerially and terrestrially using photo, laser and video, according to periodic and repeatable scientific protocols.


Working with the Senior Research Engineer (RPAS and Automation) at the QUT Research Engineering Facility we devised a plan to scan the site using laser and imagery as follows for the ‘mission’ they called UAS-196:



After some discussion, these are the specifications we agreed to:
- 2 person 4h long mission conducted by Research Engineering Facility (REF) flight operations team at SERF operating from nearby settlers hut
- Hovermap ST-X LiDAR onboard DJI M300RTK to cover the area in cross pattern with 70m side offset and orbit around “Mother tree” (the Blue gum overlooking the site).

- Handheld Hovermap ST-X LiDAR data collection with approx. 20m into the forest and around “Mother Tree” (to get additional under canopy information)

- RGB Sony A7IVR (60MPx, full frame) or DJI P1 (42MPx full frame) geotagged RGB imagery data collection for photogrammetry onboard DJI M300RTK with GSD 0.8cm/px..and the following post processing:
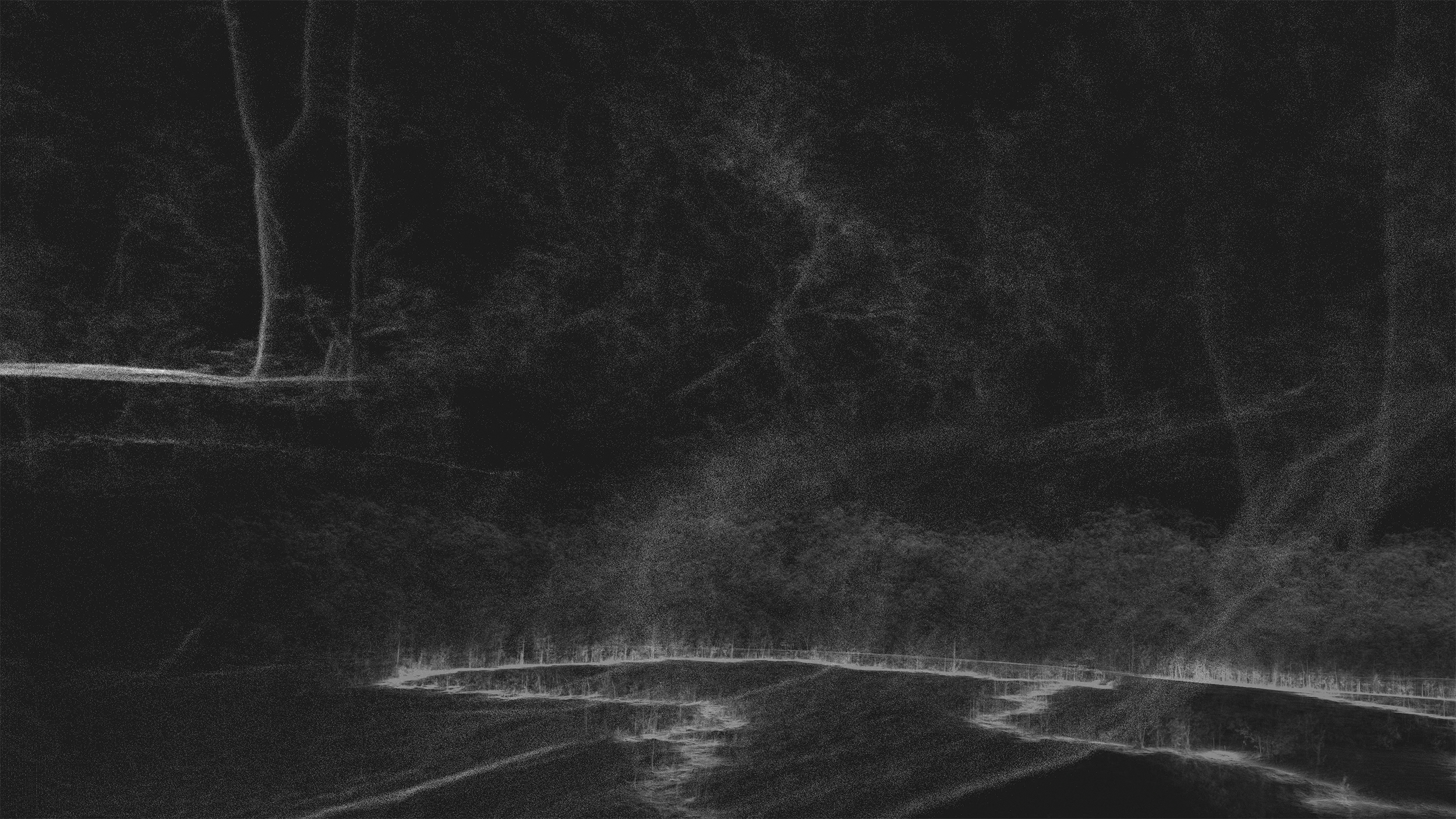
- LIDAR data post-processing to registered point clouds (.laz) and LIDAR SLAM-based trajectory (.xyz)
- LiDAR data colourisation post-processing using existing GoPro Hero9 from Hovermap ST-X colourisation kit

QUT REF team aerial setup RTK base stations, 20/8/24. (Image Keith Armstrong)
- Merging airborne and handheld LIDAR scans post-processing
- Postprocessing RGB imagery to orthomap and export of orthomosaic (hi resolution photo)
- Survey of GCP targets with Emlid Reach RS2+ (allows 1cm per pixel accuracy geolocated correctly ‘on earth’

QUT REF aerial team RTK basestations setup @ SERF 20/8/24. (Image Keith Armstrong)


- Prep and post operation data handling and handover to QUT RDSS (Udrive) the project space is included as part of QUT Research Infrastructure subsidy
- Included transport for the REF team (DMAX)

Thanks to the immaculate planning of the REF team – the day was a success – with nothing untoward the usual glitches – ie things like RTK basestations not talking to the drones always as expected, sun going in and out, etc. But several hours later the data was all collected and ready for subsequent processing.
I wish to acknowledge the support of the Research Engineering Facility (REF) team at QUT for the provision of expertise and research infrastructure in enablement of this project – and special thanks to the wonderful team Senior Research Engineer (RPAS and Automation) Dr. Dmitry Bratanov, RPAS technician Matthew Swan and Senior Design and RPAS Technician Gavin Broadbent.